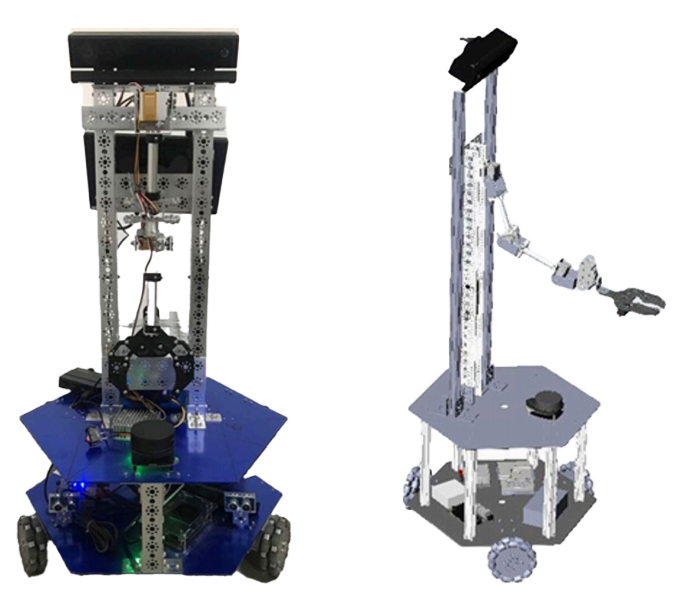
This system consists of a depth camera,Lidar,Composed of a 3-DOF robotic arm, etc.,Features omnidirectional mobility.System uses point cloud and neural network algorithms,Can recognize desktop height,And grasps specified items.System supportsROS1WithROS2, Capable ofSLAMMapping, localization, and autonomous navigation.
The large omnidirectional wheel general-purpose chassis system, equipped with a robotic arm(Or subsequently added functional modules)Automatically maps enclosed spaces,Automatic grabbing and other actions.Multiple mounting holes reserved on the machine,Can be equipped with nuclear,Life,-ization,Explosives,Drug-related detection modules,Perform multi-task operations,Can also perform bomb disposal operations.
The system has remote data transmission capability,Capable of real-time data transmission to the situational awareness platform,Enabling real-time monitoring and decision-making.